

ASIMO viết tắt từ : “ Advanced Step in Inovative
Mobility “ (tạm dịch: Bước chân sáng tạo).
Tên Asimo nghe trùng với tên một học giả chuyên viết về khoa học hiện đại và
khoa học giả tưởng : Isaac Asimov
(1920-1992).
Asimo chỉ cao đến 1,2m. Đây là chủ ý của tập
đoàn Honda, vì Asimo mục đích được tạo nên để giúp người già ngồi xe lăn tay cao
vừa tầm với robot nầy.
Trước khi đi vào chi tiết Robot Nhật mang tên là Asimo, chúng ta dạo một vòng sơ
khảo về Robot.
Hollywood đóng nhiều phim về khoa học giả tưởng như
Star Trek TNG và nhất là
Star Wars (mà báo chí Việtnam thường gọi
là Chiến Tranh Hành Tinh )... Về Star Trek chúng ta thích Robot mang tên
Rosie (nội trợ trong nhà cho Jetson ),
rồi đến Star Wars chúng ta yêu mến
Robot mang tên
C3PO ( robot sơn màu vàng, nói chuyện
líu lo )... Tất cả robot ấy đều làm từ phim trường Hollywood, không có thật.
Ngay cả Robot màu vàng C3PO đi đứng tự nhiên, leo lên lầu, chạy khá nhanh...
là do một
diễn viên rất lùn đứng ở trong điều khiển, y như một người mang áo giáp sắt kín
từ đầu đến chân vậy.
Còn robot Nhật mang tên ASIMO thì thật sự là một sáng tạo về kỹ thuật khoa học
vô cùng tân tiến của Nhật mà chưa một xứ nào làm đựoc như vậy.
Asimo, nó có thể
đi và nhất là lên lầu cầu thang tự mình nó, Asimo có thể hiểu nhiều câu sai
khiến của chủ nhân ( chỉ tiếng Nhật mà thôi ). Robot Asimo biết từng gương mặt
người trong nhà. Có thể hát vài bản nhạc ngắn nếu chủ nhân yêu cầu.
Vừa rồi tại đai hội Anh Hào G8 (gồm 8 cường quốc kinh tế trên thế giới ) họp
tại Tokyo... Asimo đến chào mừng và bắt tay từng vị nguyên thủ quốc gia đang bước
vào đại sảnh Anh hào tụ hội. Làm nhiều vị nguyên
thủ các quốc gia phải sững sờ, kính nể người Nhật vô cùng về chuyện nầy.

Một bước chân với nhiều áp lực đặt vào....
Khi chung ta cất bước thì có 2 lực tác dụng
vào chúng ta. Lực thứ nhất là trọng lực,
lực thứ nhì do bắp thịt của chúng ta tạo ra. Lực thứ nhất không thay đổi, nó
hằng hữu. Lực thứ nhì do bắp thịt, nếu chúng ta bước nhẹ thì lực tạo ra từ
chúng ta nhẹ, nếu chúng ta bước mạnh thì tiếng bước chân nghe mạnh hơn. Hai
lực nầy chúng ta gọi là lực quán
tính (inertial forces). Nhưng còn thêm lực thứ ba áp dụng vào từng bước chân của chúng ta, đó
là bàn chân của chúng ta áp vào mặt đất, gọi là
phản lực (ground reaction force)...
Đất mềm thì lực
yếu, đất bùn nhão lực cũng yếu phản ngược vào bàn chân cũa chúng ta... đó là
tùy mặt đất. Những lực nầy bắt buộc phải cân bằng với nhau
thì bước chân cất lên sẽ hiệu quả,
khoa
học gọi là “ Zero Moment Point “ (điểm
có mômen bằng không ).....
Nói hơi khó, nhưng nếu chúng ta chuyển ý theo võ thuật thì dễ hiểu hơn. Ví dụ
hai võ sinh, nhất là võ sinh nhu đạo. Môn nầy chú trọng nhất đến sự cân bằng,
mất cân bằng là bị địch thủ quăng té liền. Hai võ sinh ra sân đấu...
sau khi
làm lễ chào tổ xong thì 2 người chuẩn bị xuống tấn
công. Rồi hai võ sinh nhập đấu. Võ sinh A nắm chéo áo võ sinh B, võ
sinh B cũng làm y như vậy. Hai người đều chú trọng đến lực
quán tính nầy. Khi võ sinh A ghì áo võ sinh B, cố
ý kéo võ sinh B xuống, lập tức võ sinh B có phản ứng chống lại sự ghì nầy.
Nếu lực ghì nầy mạnh thì lực quán tính của võ sinh B cũng mạnh
theo.. Nghĩa là là có một sự mất cân bằng trong tích tắc tạo ra từ võ sinh B.
Nếu võ sinh A làm động tác nầy chừng vài lần thì sự mất cân bằng nầy càng lúc
càng nhiều... Trong chớp mắt võ sinh A có thể quăng võ sinh B bay khỏi sàn đấu
với tuyệt chiêu của mình mà mình khổ công luyện tập từ lâu.


Một phế nhân, bị mất nguyên chân... gắn lắp chân gỗ
vào. Nếu không từ từ luyện tập cho quen, thì phế nhân ấy cất bước như lúc bình
thường như ngày xưa... thì anh sẽ té xuống đất lập tức. Vì
lực thứ ba gọi là phản lực, áp đặt vào bàn
chân gỗ, anh sẽ không cảm nhận được lực ấy truyền vào thần kinh truyền lên não
bộ... thì 2 lực trước sẽ không được cân bằng.
Anh té xuống đất là như vậy.
Nói qua em bé nhỏ cất bước đầu tiên đi trện mặt đất vậy. Lực hút trái đất, lực
bắp thịt và lực dội từ mặt đất áp dụng vào nơi bàn chân bé nhỏ của em...
Em chưa
quen và em sẽ ngã một cú trời giáng đầu tiên. Em bé sẽ khóc và lần sau em cất
bước đi...như vậy vài lần em sẽ quen...quen đó là do trí óc của em ghi nhớ
hành động như vậy...trọn cuộc đời.
Nhưng Robot Asimo thì không như vậy đựơc...Robot
không thể té đi té lại nhiều lần để mà nhớ đời đuợc.
Bạn còn nhớ khi bạn đi thật lẹ, vô tình
để cân bằng trọng lượng của bạn (shift our weight
) thì mông và nhất là 2 cánh tay bạn sẽ đánh đong đưa. Càng
đi nhanh thì càng đánh 2 cánh tay càng cao. ASIMO sẽ không làm được như vậy.
Đồng thời những ngón chân rất quan trọng cho cuộc vận chuyển nhanh nầy.
Chúng ta ngày xưa có đọc truyện " Bàng Quyên chặt chân Tôn Tẩn ".
Tôn Tẩn bị
chặt mất 10 ngón chân, nên đi đứng không được, đó là một phế nhân tật nguyền
về sự di chuyển...ASIMO sẻ không có ngón chân được như vậy. Nên đi đứng rất
khó, huống chi chạy nhảy ?
Kỹ thuật
và Khoa học trong Robot ASIMO :
Để vượt trở ngại nói trên, nhóm khoa học gia và kỹ thuật gia tại Trung tâm
nghiên cứu Asimo của tập đoàn Honda làm như sau :
1.- Asimo có mông đầu gối
và ngàm nối kết nơi bàn chân.
2.- Asimo có khớp nối làm sao cho đạt được tiêu chuẩn mà cơ khí (
mechanics) gọi là "degrees of freedom"(độ
tự do) . Mỗi degree of
freedom sẽ cho phép sự cử động dễ dàng khi hướng về bên phải, bên trái, hạ xuống
hay đưa lên.
ASIMO có đến 26 độ tự do trện
trục nối kết thân mình robot. Tại cần cổ thì
Asimo có đến 2 độ tự do, tại
cánh tay thì Asimo có đến 6 và tại chân thì Asimo có đến 6
độ.
Tại chân của Asimo nhờ có đến 6 degrees of freedom thì Asimo mới có thể cất
bước, hay thụt lùi trên mặt đất hoặc đi lên cầu thang và xuống cầu thang một
cách nhẹ nhàng, êm đềm.


Những độ tự do
Asimo có những phần tử nhạy (sensor) quan trọng
như : “
speed sensors “ và “
gyroscope sensor “ gấn bên trong người
Asimo. Nhờ những sensors đó thì Asimo mới biết mình đi đến đâu và ở tại chỗ nào
cần ngừng lại. Như khi đến bắt tay thượng khách tại Quần Anh
Hội tại Sảnh đường thì Asimo tiến đến chào vị quan khách đó, Asimo ngừng lại chớ
không kéo tay khách đi hết phòng nầy sang phòng nọ rồi mới ngừng.
Hai loại sensors nầy hoạt động như “inner ears“ của chúng ta vậy (Nó nằm trong ốc thể gắn màng nhĩ của lỗ tai ).
Để cất bước trên mọi loại đất bằng (như đất nhão, đất trơn, đất cứng hay có
nhiều đá gạch) thì Asimo có “ joint-angle sensors “ và có đến “ six-axis force
sensors “. Điều nầy là một bước tiến mới cho kỹ nghệ robot là Asimo có thể xoay
mình rất dễ dàng, uyển chuyển chớ không cứng ngắc như robot mà chúng ta thấy
trên màn hình Tivi Hollywood tạo ra, gọi là khả
năng xoay. (nếu không có kh" năng xoay, robot cứng ngắc:
robot ngưng lại (stop) rồi quay người một góc ( stop ) rồi quay thêm một
góc, rồi stop lại rồi quay mình tiếp ). Lấy ví dụ Asimo có thể
đứng ngay
cửa ra vào, thấy khách đến thì tự động lui lại rồi xoay mình nhẹ nhàng mở cửa
cho khách vào, rồi xoay nhẹ nhàng đóng cửa lại. Nếu
không có khả năng xoay thì robot sẽ
lui lại, xoay mình một chút, rồi xoay mình tiếp, rồi mở cửa một chút, rồi
xoay mình tiếp rồi mở hết cửa cho khách vào...rồi xoay mình một chút, rồi đóng
phân nửa cánh cửa, rồi xoay tiếp cho đến khi đóng hết cánh cửa lại..
Như vậy
khách mà thấy robot nầy lần sau thì khách tốt hơn là leo cửa sổ vào nhà thì
nhanh hơn, ít tốn giờ hơn là chớ robot mở cửa rồi đóng cửa....
Thêm một sự sáng chế nữa của tập đoàn Honda khi tạo Asimo,
họ gọi là : “
Honda’s Intelligent Walking Technology “ ( nói nôm na là : predictive movement control
, kiểm soát động tác đã dự tính trước)...
nghĩa là khi Asimo quẹo đến một góc ngay ngã tư thì Asimo sẽ tự biết
làm cho thân mình mình xoay quẹo bao nhiêu góc độ mà không đụng vào góc tường đó. Ví dụ như em bé mới tập đi, sau nhiều lân em té thì em biết đi chập chững.
Nhưng nếu người mẹ mà không đón em ở đằng trước thì em bé sẽ đụng vách tường khi
em bé muốn quẹo vậy. Thành thử chúng ta không ngạc nhiên khi thấy người mẹ vỗ
tay hoan hô con cất bước đi, rồi người mẹ chạy ra đằng trước mà đón em, rồi vỗ
tay gọi con chú ý cất bước... sau cùng người mẹ phải chụp
lấy con kẻo con đụng vách tường.
Như vậy chúng ta tóm lại khi Asimo cất bước, rồi quẹo khi đến hành lang, rồi
đi tiếp...thì những sensors nầy phải làm sao cho :
1.- Khoảng cách từng bước
2.- Vị trí thân thể khi chuyển động
3.- Tốc độ cất bước
4.- Biết mình ở đâu và sẽ đến đâu

ASIMO cất bước ( xin nhìn kỹ những tấm gạch ô
vuông màu xanh để đo bước đi của
ASIMO )
Bây giờ chúng ta nói đến
sự nhìn (vision) của ASIMO. Sự nhìn của
Asimo không khác gì một cái máy camera, hay nói gọn hơn là “
Video camera “. Nằm ngay phần đầu của
Asimo. Nhưng Video Camera nầy khác các chủng loại Video camera mà Police đang
sử dụng. Video Camera của ASIMO là “ Vision
Algorithm “. Nó cho phép ASIMO nhìn, nhận biết, và né tránh một số vật cử
động nào đó. Nó không được phép đâm sầm vào bạn, hay là đi ngênh
ngang bị xe cán chết trong sân hay ngoài đường.
Còn Bộ Nhớ bộ nhớ của ASIMO được kỹ sư gài vào bằng hệ thống scanner
hình ảnh cho
vào bộ nhớ của ASIMO. Asimo có thể nhớ gia đình thân quyến đến 40 người,
người thứ 41 thì bộ nhớ không ghi vào được.
Bạn có thể dùng Cameras relay (via USB), khi bạn kiểm soát Asimo từ PC thì hệ thống gởi tín hiêu sẽ gởi đến bạn trên
máy vi tính. Khi Asimo nhìn thì người điều khiển máy PC cũng
nhìn y như vậy.
Ngày kia nếu bộ nhớ càng nhiều nghìn GB ( gọi là Tetra Bites ) thỉ ASIMO có thể
nhớ đến những gương mặt của tên côn đồ trong làng xóm của bạn...
Khi tên côn đồ
ấy đột nhật vào nhà bạn thì ảnh tên côn đồ có thể
gởi trực tiếp đến nhân
viên an ninh hay ty cảnh sát công an gần nhà bạn liền lập tức.
ASIMO có mang sau lưng một túi hành trang (packback). Túi nầy chứa đựng máy vi tính, máy vi
tính nầy dùng đề kiểm soát ASIMO hoàn toàn mọi hành động của ASIMO.
Ngoài ra
ASIMO còn có thể nghe được bởi hệ thống Voice
Commands gắn sau lưng trong túi hành trang đó. Hiện nay
ASIMO có hệ thống trả lời cho bạn một số câu trả lời nào đó ( ta gọi là : Respond Verbally ).
ASIMO dùng Rechargable Battery để sạc điện.
Battery là : 40 volts, Nickel- Metal Hybride
battery... dùng được 45 phút trực tiếp và một battery dự phòng xài được
30 phút nữa. Hy vọng ngày kia có thể dùng đươc 24 giờ liên tiếp không cần
sạc điện.
Ngày kia ASIMO có thể tự động đi nạp điện cho battery khi Asimo biết là gần hết
điện trong người rồi.
Ngày kia không xa lắm thì ASIMO sẽ bán ra ngoài thị trường cho dân chúng mua về
xài. Dĩ nhiên sẽ có một Bà vợ Hoạn Thư mua về canh chồng đi uống rượu về nhà quá
khuya.
........
Một đêm khuya nọ, gà gần gáy canh tư...
có tiếng chìa khóa mở cửa nhà...Một
bóng đen chưa kịp vào hẳn trong nhà thì có tiếng ASIMO nói liền :
“ – Chào ông
chủ ! Sao giờ nầy mới bò về ? Bộ tiệm nhậu đuổi về nhà rồi phải không ? – Nhớ đi
rửa mặt, thay đồ rồi lên lầu đi ngủ đi, mùi rượu hôi lắm đó, đừng như kỳ trước
lủi vào góc bếp rồi ngủ tới sáng
làm người ăn người ở trong nhà cười chết đi
thôi. À ! Nhớ mai trả tiền nhà đi đấy...
rồi đem xe bà chủ đi sửa vì hư cái
phanh rồi...”
Lúc nầy Ông Chủ tức điên lên rồi : “ Mầy nói nữa là tao đạp mầy một đạp, tống
cổ mày ra ngoài dường bây giờ. Cái thằng người làm phản chủ “...
Ông chủ quên mất ASIMO là người máy nên lời nói sau nầy của Ông chủ làm nó không
giận chút nào. Nó vẫn tỉnh bơ, còn ông chủ thì đang
giận sôi máu, giận điên người trong lúc bà chủ đang nằm
trên lầu nghe hết mọi chuyện...Bà cười một mình...Bà thầm nghĩ : “ Cái thằng
ASIMO nầy giỏi thiệt tình, ngày mai nầy ta dạy nó nói nhiều câu hay hơn sẽ làm
cho lão già nầy.... bỏ thói đi nhậu về khuya mới được... “
Bạn có thể mua trọn gói về Vision của Robot đơn giản nhất của Trường đại học
Carnegie Mellon chế tạo ra. Gọi là CMU Real time object tracking
vision system.

Hệ thống nhìn của robot
Nhưng sự nhìn của ASIMO thì phức tạp hơn nhiều. Nó được chế tạo tại Mountain
View, California ( tại Honda Research Institute ở Moutain View View/ California
). Họ gọi nơi nầy là : Innovative for new Concepts.
Sau đó được thuần túy thêm tại Đức. Tại Honda Research Institute Europe GmbH,
ở tại Offenbach/ Germany ). Họ gọi nơi nầy là : Research new
Concepts.
Rồi tất cả tập trung về Nhật. Tại Honda Research Institute Japan., Ltd.
Họ gọi nơi nầy là : “ Bring new Concepts to Life “ ( ở tại Kazusa/ Japan ).
Đây là phần hơi phức tạp tại một Lab của Hoaky...Phức tạp hơn một miếng CMU
Vision nói trên

Đây là phần cứng và phần
mềm ( sơ đồ )_ dùng chế
tạo một robot cho dự án khi ra trường đại học về Mechanical + Computer Science
chuyên về Robotic...

Lịch sử thành lập ASIMO của hãng HONDA tại Nhật
Tại Nhật không hẳn tập đoàn HONDA là công ty duy nhất
chế tạo ra người máy ASIMO. Còn có công ty SONY, nổi danh với chú chó
“ ORIO
“... bán rất đắt tiền tại Hoaky, có con lên đến 5 ngìn USD. Chú chó Orio biết
sủa, bước chậm đến chủ mừng rỡ. Có lần báo chí Hoaky đăng tin cảm động về chú
chó nầy như sau : “ Ba hôm rồi sao chủ không ôm hôn tôi như mọi lần ? Tôi nhớ
chủ biết là bao...” Chú chó Orio có hiện ra dòng chữ trên kính che hết gương
mặt những dòng chữ như vậy. Vì chủ nhân bị bệnh đi nhà thương vài hôm,
khi về thì chú chó bước chậm đến chào và hiện dòng chữ như vậy đó Ngoài ra còn
có công ty Fujiitsu với Hoap-1-Robot
và Dr. Robot.

Chú chó AIBO thân thiện tại Hoaky của tập đoàn Sony Corp

Robot HOAP-1 của tập đoàn Fujiitsu Corp.
Lịch sử ASIMO ( còn
gọi là The ASIMO Timeline ) :
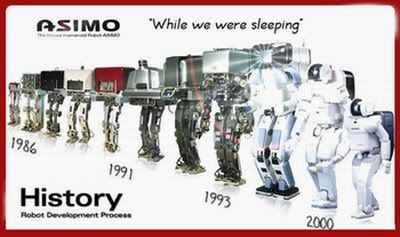
1- vào năm 1986 thì gọi là
Static Walking. Chỉ có một thùng máy móc
trên đầu và 2 chân trơ gầy bằng sắt, sau lưng rất nhiều dây điện nối với máy
chủ Computer. Honda gọi là E0 ( Nghĩa là
Experiment 0. Tại sao họ gọi là “ Static Walking “, họ giải thích như
sau : Robot nầy chế ra mục đích là đi. Một chân bước trước cho vững, rồi chân
sau chậm rãi cất bước tơi. Khi 2 chân thẳng hàng thì chân kia bước tiếp. Robot
E 0 chỉ đi đúng với mặt phẳng thật phẳng, và đi thẳng mà thôi.
Đi vô cùng chậm
làm sốt ruột nhóm kỹ sư điều chế ra nó.
Sau đó tập đoàn Honda không hài lòng,
vì Robot bước theo kiểu nầy thì hết giờ giấc rồi, tạo cảm giác cho chủ nhân y
như người bị tê liệt ráng cất bước đi.
Nên tập đoàn Honda tiếp tục nghiên cứu tiếp.
2- Năm 1987 thì gọi là : “
Dynamic Walking “. Lúc nầy Robot biết đi
khá lẹ rồi, nghĩa là 2 chân cất bước theo nhịp song hành chớ không còn chân nầy
chờ chân kia đâu. Họ gọi là Robot E 1
rồi đến E 2, E 3
.
3- Năm 1991 thì tập đoàn Honda làm được Robot đi đứng chuyên nghiệp rồi. Họ gọi
là Walking Pro. Robot nầy có thể cất
bước đi nhẹ nhàng, đi độ dốc nghiêng...
Đến đoạn E 6 thì Robot có thể lên xuống
thang lầu dễ dàng rồi. Đến đây tập đoàn Honda khá vui.
Rồi họ còn phải chế ra
cánh tay biết cử động, biết cầm bình sữa cho con nít, hay cầm 1 tờ giấy thư từ
cho chủ. Sau đó nhóm nghiên cứu Research của tập đoàn Honda đi lần đến thân thể, rồi đến cái đầu Robot...
4- Năm 1991 đến 1993 thì Robot nầy trông khá giống như con người rồi. Họ chuyển
danh từ từ E6, E7 sang P1, P2 ( do chữ viết
tắt là Prototypes, nghĩa là hàng mẫu ). Lúc nầy Robot P2 giống như người nhưng nó quá cao,
cao đến 6 feet 2 ( gần 188 cm )., nặng
đến 386 pounds (
tương đương 175 kg )..Vì nó quá cao nên làm người già hay con nít lo sợ
khi đứng gần. Ngộ nhỡ nó chạm điện trong người thì nó dám nắm cần cổ mình lên
như chơi... Chờ người ta tắt điện Robot thì mình đã lên Thiên đàng mất rồi.
Sau đó họ giảm xuống
Robot
P3 chỉ
còn nặng 463 lbs ( = 210 kg )
(?). Nhưng tập đoàn Honda không hài lòng vì nó có thể đạp lên chân bà chủ ở
nhà bếp, làm bà chủ chân băng bột cả tháng trường.
Mỗi lần thu nhỏ lại thì hệ thống phải thu nhỏ theo, như computer,
video, electronics phải thu gọn lại. Những món nầy không phải mua dễ dàng tại
các tiệm computers hay electronics ngoài thị trường được.
Thu gọn thay đổi là phải thu gọn thay đổi hết mọi cơ cấu trong người Robot.
5- Đến năm 1997 thì ASIMO có hình dạng
trông giống như bây giờ. Tất cả nhóm nghiên cứu đồng ý thu nhỏ Robot nầy xuống
còn 122 cm. Như vậy ASIMO có thể nhìn dễ dàng bàn làm việc
của chủ nhân, hay nhìn trực tiếp một bà cụ đang ngồi ghế xe lăn tay mà không
cần cúi xuống ngó, để bà cụ phải ngước lên mà nói chuyện với Asimo. Nhỏ và lùn
như vậy rất dễ thân thiện với mấy em bé trong nhà. Tạo cảm giác như người thân
trong nhà vậy.
6- Đoạn chót năm 2000 thì tập đoàn Honda thành công với 1 sự sáng chế riêng cho
công ty của mình, họ gọi là “ Predicted
Movement Control “ (kiểm soát động tác đã tiên đoán, nghĩa là Asimo biết cầm trứng gà ra làm sao hay nâng
cái ghế hay cầm cái chổi quét nhà ra làm sao, nếu làm ngược thì bể hột gà hay
làm đổ nước tung tóe khắp thảm đắt tiền của chủ...
7- Năm 2006 thì ASIMO có thể chạy chậm Jogging với chủ nhà khi ra ngoài đường
vắng được rồi. Nó có thể nói, nhận biết người thân kẻ lạ trong nhà, hay có
thể hát líu lo hay nhảy vài bản nhạc cho chủ vui như khi chủ báo tin được xếp
tăng lương cho mình vậy...
Như vậy Honda thành công, họ sẽ tung ra hàng loạt bán ra ngoài thị trường cho
công chúng mua về sử dụng,
như quét nhà, đẩy ghế xe lăn tay cho bà cụ ra ngoài
sân hóng mát, trò chuyện với chủ nhân. Vui mừng với chủ nhân...
©
http://vietsciences.free.fr
và http://vietsciences.org
Sagant Phan